
Year: 2017
Some Wikipedia article titles I have enjoyed
Posted by – December 20, 2017
Health and appearance of Michael Jackson
Exploding head syndrome (btw, I have experienced this)
The Jimmy Carter rabbit incident one also references the following:
George H. W. Bush vomiting incident
Bill Clinton haircut controversy
Those were simpler times..
Neuroverkkokurssi
Posted by – December 16, 2017
Opetimme Vadimin (Kulikov) kanssa viime keskiviikkona ensimmäistä kertaa kaupallisen version koneoppimis / neuroverkkokurssistamme. Järjestelyt hoiti Alma Talent ja kurssi pidettiin Crowne Plazassa. Aika hulppeaa! Kurssi meni hyvin ja jatkoa jossain muodossa varmaankin seuraa.
Jos kiinnostaa tietää mitä siellä selostin, tein handout-materiaalin jota saa lukea vapaasti.
Extremism and loserdom
Posted by – December 15, 2017
I wonder how much of an illusion it is that losers have extreme views and winners have moderate views. After all, it’s only the winners who have something to lose.
Some winners let on that they have extreme views, but don’t spell them out (eg. Peter Thiel). Probably many winners want stability, which is why they are moderate. But my guess is that extreme winners are in general extreme people, and that secretly many of them hold extreme views. Perhaps this is one reason why people are suspicious of the power of the very rich.
Both the far right and far left are often shamed for being made up of losers, but I’ve always found that unconvincing. They’re just the only people who can be that under their real names. There’s probably a lot more who are anonymous or silent.
A lot of moderate people aren’t really moderate, but too busy or tired to think about politics.
Rightists believe that left-of-centre politicians, all journalists, creatives etc. are basically socialists waging a semi-covert “cultural war” against traditional society, and they’re not completely wrong. Especially in a country like Finland they all basically know each other and agree with each other. Leftists believe that the average white man is actually quite sexist, racist, authoritarian, quasi-fascist, and they’re not completely wrong. I include myself in that (leftist) description. But it really is all in your point of view.
My favourite quote of late is the one about “the line between good and evil runs through the heart of every man”. Quite a lot of people can be made to say something rather extreme in some circumstances, especially on the Internet. Face-to-face, in mixed company, people are both more moderate and more accepting of different views.
Deep thought
Posted by – December 7, 2017
Just because you have the ability to make fun of something, doesn’t mean you understand it.
Itsenäisyyspäivän kliseistä mieleentullutta
Posted by – December 6, 2017
Mitä suomalaisuus merkitsee minulle? 95-prosenttisesti se tarkoittaa erään etnisen ryhmän (“suomalaiset”) elämäntapaa, yhteiseloa ja saavutuksia. Monikulttuurisuudella on puolensa, mutta suomalaisuuden kanssa sillä on aika vähän tekemistä.
Go to bed
Posted by – December 5, 2017
This inexplicable four-second video had me in tears laughing. Maybe it’s bedtime.
edits:
This also has that kind of intensity of confusing action, though scripted.

Something special about this too.
And I can’t believe I haven’t seen this gag before.

Just a perfect little gem.

Tiny sound gag, you could make a million of these but it’s still funny.

This one is all in the perfectly timed cut at the end.

This one would be better if the dad didn’t laugh at the end.

This one has to be saved for later use.

Oh and how could I forget the Perfect Video, fasthonk.mp4, 10 seconds including introduction, main content, and conclusion.
Incident at Isla Nublar
Posted by – November 26, 2017
My candidate for the perfect Steven Spielberg scene: Incident at Isla Nublar. Criterion: intense emotional action with sparse but suggestive visual information.
My net neutrality opinion, free of charge
Posted by – November 23, 2017
Net neutrality is a heavy-handed regulation that’s probably not necessary; antitrust laws are enough. Net neutrality isn’t really about censorship worries but about market conditions for network infrastructure suppliers vs. data consumers.
Most opposition to net neutrality, though masked in talk about “openness” and “freedom”, is driven by the consumers of large amounts of data traffic (eg. Netflix and its customers) who are essentially looking for a free ride. The owners of the networking infrastructure want to be able to negotiate for payments from those heavy users. Net neutrality blocks this, and forces everyone to pay for HD video transmission capacity across the network whether or not they want Netflix.
Regardless of net neutrality, most people choose centralized, controlled, non-neutral places like Facebook for everything anyway. (I don’t like that and I don’t do that, but that’s people.)
For worries about networks and content ending up in the same hands, with the networks favouring their own content, we already have regulations about free competition. So we don’t need net neutrality, it’s an unnecessary regulation, and I’m opposed to unnecessary regulations on principle.
Missing drama
Posted by – November 22, 2017
How can it be that there is no major dramatic portrayal of the life and times of William the Conqueror (& Harold II)?
A sense of pluralism
Posted by – November 16, 2017
Sujatha Gidla on Marxism as her worldview:
No, it’s a worldview. I would say Marxism is a worldview, and Marxism looks at the world in terms of class, like feminists looks at the world as men and women, and religious people look at the world as Christians and non-Christians, and Marxists look at people as workers and capitalists.
That is the worldview I hold, and I look at problems arising out of class difference, and I look at solutions that could arise out of class action.
That’s also how I view ideologies / worldviews, and pluralism to me is the idea of holding multiple worldviews in your head at the same time, and being not just tolerant but curious and positive about other worldviews.
Updated quote
Posted by – November 12, 2017
I can no longer sit back and allow SJW infiltration, SJW indoctrination, SJW subversion and the international social justice conspiracy to sap and impurify all of our precious bodily fluids.
In defense of normies
Posted by – November 9, 2017
One has to assume that for every Hollywood sexual harassment case, there’s a hundred cases where the inappropriate advances led to quid pro quo sex. In that environment quite a lot of men turn into predators.
Maybe there’s something to having norms about sexuality after all?
Arvosteluasteikko
Posted by – November 8, 2017
1: jäätävää paskaa
2: kiusaannuttavaa paskaa
3: peruspaskaa
4: tiukkaa shittiä
5: todella hyvää shittiä
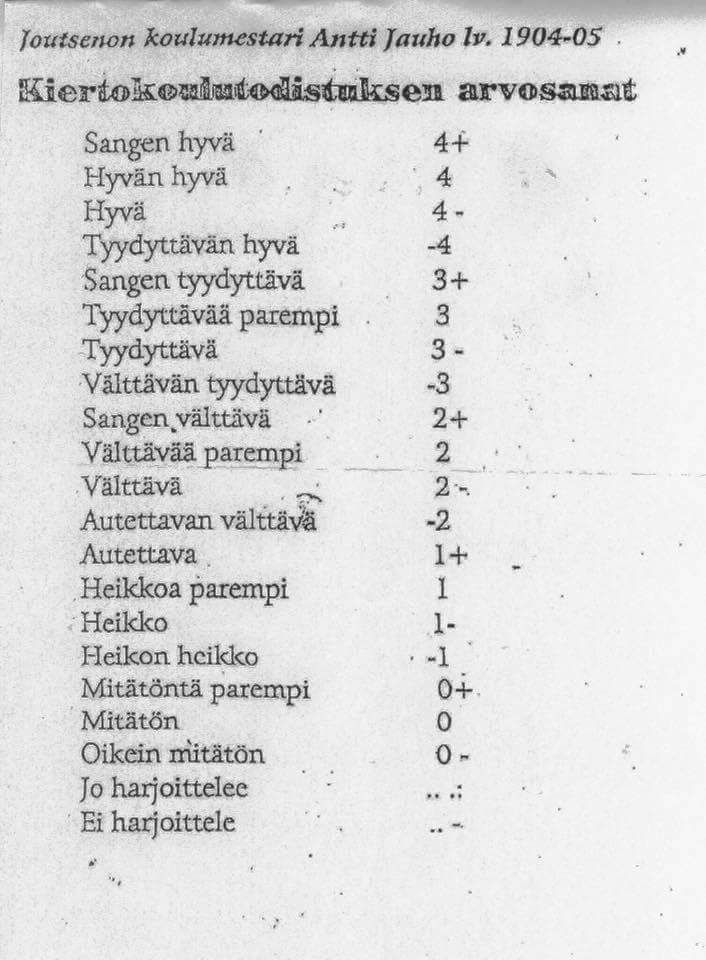
Krediitti Constantin Kašhei Lapineau’lle
Fucktrophy
Posted by – November 7, 2017
For some reason I enjoy browsing childfree forums where people discuss how great it is to not have children. They often use amusing words for children, like “crotchfruit”. My favourite is “fucktrophy”. As in, “Here are my badminton trophies from when I used to play.. And here are my fucktrophies, Rufus and Doofus.” It sounds sort of endearing to me.
